






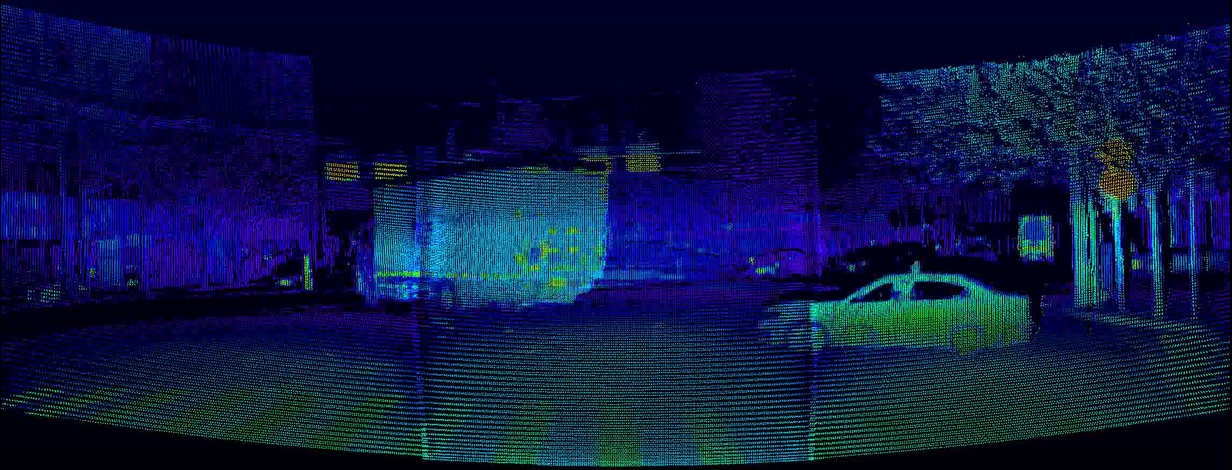
Scene #1
Overview
Sophisticated LiDAR technology meets high-quality data annotation
Data Collection
Complex Driving Scenarios in Urban Environments
Car Setup
Vehicle, Sensor and Camera Details
- 5
- 10 Hz capture frequency
- 1/2.7” CMOS sensor of 1920x1080 resolution
- Images are unpacked to YUV 4:4:4 format and compressed to JPEG
Wide-Angle Cameras - 1
- 10 Hz capture frequency
- 1/2.7” CMOS sensor of 1920x1080 resolution
- Images are unpacked to YUV 4:4:4 format and compressed to JPEG
Long-Focus Camera - 1
- 1x Spinning LiDARs
- 64 channels
- 200m range @ 10% reflectivity
- 360° horizontal FOV; 40° vertical FOV (-25° to +15°)
- 0.2° horizontal angular resolution (10 Hz); 0.167° vertical angular resolution (finest)
- 10 Hz capture frequency
Pandar64: Mechanical Spinning LiDAR - 1
- Equivalent to 150 channels at 10 Hz
- 300m range @ 10% reflectivity
- 60° horizontal FOV; 20° vertical FOV (-10° to +10° with ±5° offset, configurable)
- 0.1° horizontal angular resolution; 0.07° vertical angular resolution (finest) at 10 Hz
- 10 Hz capture frequency
PandarGT: Solid-State LiDAR
PandarGT Road Test
Sensor Calibration
Data alignment between sensors and cameras
LiDAR extrinsics
Camera extrinsics
Camera intrinsic calibration
IMU extrinsics

Data Annotation